Základní přístup k otázkám bezpečnosti a ergonomie při projektování kolaborativních pracovišť
BASIC APPROACH TO SAFETY AND ERGONOMICS ISSUES IN DESIGNING COLABORATIVE WORKPLACES
Václava Pokorná1
1Západočeská univerzita v Plzni, Fakulta strojní, Katedra technologie obrábění pok@kto.zcu.cz
Abstrakt
Současný svět průmyslové výroby lze definovat jako období růstu a výrazných změn od tradičních technologií k naprosto novým řešením a převratným změnám. Jedním z těchto trendů je zavádění kolaborativních robotů do výroby. Změny, které jsou spojeny s nákupem automatizační techniky a robotů jsou nejen finančně náročné, ale vyžadují především nový přístup při řešení a projektování pracovišť, který úzce souvisí s vybranými principy ergonomických zásad. Ty získávají v současném světě využívání moderních technologií a rozvoji automatizace nový význam. V tomto pojetí jsou více propojeni s požadavky na nutnou úroveň bezpečnosti. Standard ISO 9241-210:2010 představuje návod pro uplatnění nového přístupu (HCD) pro designové řešení produktu. Tento dokument je nezbytným doplňkem stávajících norem pro návrh společných pracovišť člověk-robot a v současnosti není mezi projektanty příliš známý. Antropocentrický přístup při projektování takových pracovišť je založen na myšlence, že člověk má oproti robotu určitá omezení a tato omezení mohou být hlavní příčinou chyb a selhání, související s prací operátora. Toto je důvod, proč by mělo být osvojení ergonomických zásad, rovněž tak znalost ISO 9241-210, součástí projektových prací při návrhu kolaborativních pracovišť.
Klíčová slova: ergonomie, kolaborativní robot, standard ISO 9241-210, Human–centered-design (HCD)
Abstract
The current world of industrial production can be defined as a period of growth and significant changes from traditional technologies to new solutions and revolutionary changes. One of these trends is the introduction of collaborative robots into production. The changes associated with purchasing automation techniques and the robots are not only expensive, but also they require new approach workplace designing which needs to follow the ergonomic principles. These ergonomic principles are gaining new significance in today's world where modern technologies and automation is used more. These principles are more closely linked to the requirements for the necessary level of security. ISO 9241-210: 2010 provides guidance on the application of the New Approach (HCD) to design solutions. This document is a suitable complement to the existing standards for the design of “human-robot” workplaces which isn’t yet too known amongst project designers. The anthropocentric approach in designing a suitable workplace is based on the idea that humans have certain restrictions, and these restrictions or limitations can be the cause of errors and failures related to the work of the operator. This is the reason why getting familiar with the ergonomic principles, as well as ISO 9241-210, should be part of the process of designing collaborative workplaces
Keywords: ergonomics, collaborative robot, ISO 9241-210 standard, Human-centred design (HCD)
Přijat k publikování / Received for publication 3. 9. 2020
Úvod
Současný svět průmyslové výroby lze definovat jako období růstu a výrazných změn od tradičních technologií k naprosto novým řešením a převratným změnám. Důvody k jejich zavedení je několik, nejdůležitější je jistě vyšší produktivita a snížení nákladů na výrobu. Nepochybně zde hraje roli také získání konkurenční výhody, dané pružnější reakcí na poptávku zákazníků. Možnost, jak řešit tyto požadavky je zavedení určitého stupně automatizace a robotizace. Toto řešení vyžaduje detailně vypracovaný strategický plán. Změny, které jsou spojeny s nákupem automatizační techniky a robotů jsou nejen finančně náročné, ale zároveň vyžadují restrukturalizaci výroby podle nových prostorových požadavků, zavedení nových procesů a postupů, vypracování bezpečnostních pokynů, zaškolení obsluhy. V mnohých případech jsou kladeny specifické podmínky také na techniku prostředí. Z výše uvedených důvodů se zejména střední firmy častěji rozhodnou pro částečnou automatizaci a použití spolupracujících robotů tzv. kolaborativních robotů. V odborné literatuře je tento pojem označován německou zkratkou MRK (Mensch Roboter Kollaboration), nebo anglickým výrazem HRC (Human Robot Collaboration). Ve světě je očekáván v následujících letech prudký nárůst trhu s kolaborativními roboty. Podle dat analýzy společnosti Markets and Markets je reálný předpoklad nárůstu investic do roku 2025 o více jak dvacetinásobek. Viz graf č. 1
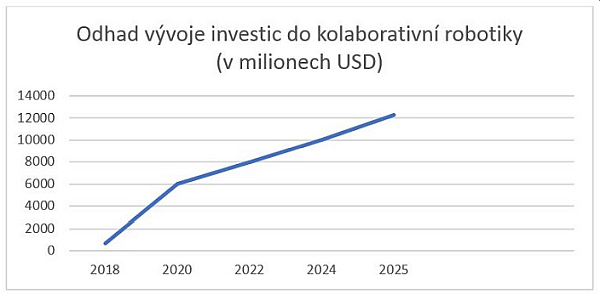
Obr. č. 1: Předpoklad nárůstu investic do kolaborativní robotiky [1]
Nová kategorie robotiky byla poprvé představena v roce 2008 Dánem Esbenem Østergaardem, který je spoluzakladatelem společnosti Universal Robots. Østergaard chtěl, aby byla robotická technologie dostupná všem společnostem, bez ohledu na jejich velikost. Za tímto účelem vyvinul malé, uživatelsky přívětivé, flexibilní a ekonomické roboty, s nimiž může člověk bezpečně pracovat v těsné blízkosti. V současné době se stále více společností po celém světě rozhoduje pro automatizaci svých výrobních procesů využít roboty. Mezinárodní federace robotiky (IFR) vnímá kolaborativní roboty jako jeden z nejdůležitějších technologických trendů, které budou v budoucnosti formovat trh. [1]
Rostoucí zájem o kolaborativní robotiku je také vyvolán konceptem Průmyslu 4.0, který předpokládá vysoký podíl automatizace ve všech průmyslových odvětvích. Další rozvoj kolaborativního prostředí je zakotven v dokumentu: Inovační strategie České republiky 2019- 2030, která byla schválena Usnesením vlády ČR ze dne 4. února 2019. Jedná se o strategický rámcový plán, který předurčuje vládní politiku v oblasti výzkumu, vývoje a inovací a má pomoci České republice se během dvanácti let posunout mezi nejinovativnější země Evropy. Inovační strategie se skládá z devíti navzájem provázaných pilířů, které obsahují východiska, základní strategické cíle a nástroje vedoucí k jejich naplnění. Jsou jimi oblasti: Financování a hodnocení výzkumu a vývoje, Inovační a výzkumná centra, Národní start-up a spin-off prostředí, Polytechnické vzdělávání, Digitalizace, Mobilita a stavební prostředí, Ochrana duševního vlastnictví, Chytré investice a Chytrý marketing. Inovační strategii zpracovala vládní Rada pro výzkum, vývoj a inovace v úzké spolupráci s více než třicetičlenným týmem osobností z řad podnikatelů, vědců, akademiků a zástupců veřejné správy [2].
Obecná charakteristika kolaborativních robotů
Ve výrobě již existuje mnoho příkladů, kdy je naprosto efektivní zavést systém člověk - robot do praxe. Velké automobilové společnosti jsou jedni z předních odběratelů, příkladem v ČR je firma ŠKODA AUTO a.s. Kolaborativní roboty tak mohou být zavedeny tam, kde je omezený zástavbový prostor a není zde možnost využít konvenční robot. Obecná charakteristika kolaborativních robotů v hlavních bodech:
- menší prostorové nároky,
- možnost přestavby při změně výroby,
- jednoduché programování a variabilita použití,
- konstrukce splňující bezpečnostní požadavky,
- dokonale řešená ergonomie pracoviště s ohledem na interakci s obsluhou,
- rychlé zavedení do praxe
Předností společných pracovišť člověk – robot je několik. Příkladem může být eliminace zdravotních rizik pro operátora při manipulaci s těžkým břemenem. Jako další příklady je možné uvést operace, kdy musí operátor pracovat v nevhodných pracovních pozicích, nebo musí při montáži použít sílu. Omezení opakujících se operací je dalším nezpochybnitelným důvodem k robotizaci pracoviště. Odstranění monotónních operací souvisí jak s ergonomií, tak kvalitou. Situace, kdy robot vykonává pouze jednoduché operace typu: odebírání, vložení, spojování několika součástek dohromady, je jednoznačně efektivní řešení. Posledním příkladem pro aplikaci robota na pracovišti je nahrazení obsluhy obráběcího stroje. Roboti tak odebírají ze zásobníku polotovary a zakládají je do pracovního prostoru stroje. Po obrobení součástky je opět uchopí a založí do výstupního zásobníku. Robot zde může také provádět kontrolu součásti, nebo další technologické operace. Výhodné je použití kolaborativního robota v uspořádání tzv. hnízda, kdy zařízení obsluhuje více strojů najednou.

Obr. č. 2: Ukázka práce kolaborativního robota při obrábění [3]
Spolupráce robota s člověkem ve vztahu k bezpečnostním požadavkům
V odborných publikacích [4] se uvádí, že lidská práce má v průměru 78 % přesnost, oproti softwarovému robotu, který dosahuje přesnosti i více než 95 % a je zhruba 20x rychlejší než člověk. Toto jsou tvrzení, která podporují růst zavádění kolaborativních pracovišť. Je to optimální stav, kdy je možné spojit preciznost robotů společně s tvůrčími schopnostmi lidí. V literatuře [ 5] autoři provedli analýzu bezpečnostních požadavků ve vztahu k legislativě v ČR. Je zde konstatováno, že legislativní podmínky v ČR pro zavedení kolaborativních robotů jsou podobné podmínkám v ostatních členských státech EU. Předpisy, které zahrnují rizika spojená se spoluprací člověk- robot, jsou uvedena v mezinárodní normě ČSN EN ISO 10 218 -1,2. Kolaborativní roboti jsou v těchto normách začleněny do obecné skupiny průmyslových robotů. Standardně vyrábění průmysloví roboti však nemají tzv. koncový efektor (end-efector). To je zařízení, které na konci robotického ramene mapuje okolní prostředí během práce a při jakékoli nestandartní situaci práci přeruší. Proto většinou klasické průmyslové robotické systémy pracují v odděleném prostoru, bez lidí, aby nedocházelo k zraněním. Technická norma CSN EN ISO 10218-2 stanoví bezpečnostní požadavky na integraci průmyslových robotů do systému a průmyslových buněk robotů, jak jsou definovány v ISO 10218-1, [5]. Důležitou částí technické normy ISO 10218-2 je kapitola 4.5. Zde je uvedeno, že jakmile je zjištěno nebezpečí, je nutné posoudit rizika spojená s robotickým systémem. Podle norem ČSN EN ISO 10218-2 jsou popsány 4 typy pracovišť, kde dochází ke spolupráci člověka a robota. Každý případ vyžaduje analýzu pro zamezení kolize operátora s robotem. Z pohledu projektování pracoviště je nejsnazší způsob ten, kdy je prostor operátora pevně oddělen a kontakt je nemožný. Složitější studie musí být provedena v případě, kdy operátor není od robota oddělen bezpečnostní klecí nebo jinou formou zábrany. Každý sdílí svůj prostor bez dalších bariér. Důkladný a do všech podrobností vypracovaný registr rizik musí být pro případ, kdy je pracovník i robot na jednom pracovišti a jejich úkony na sebe navazují podle předem definovaného postupu. Rovněž další dva typy spolupráce člověk-robot vyžaduje velice precizní identifikaci rizik při projektování kolaborativního pracoviště.
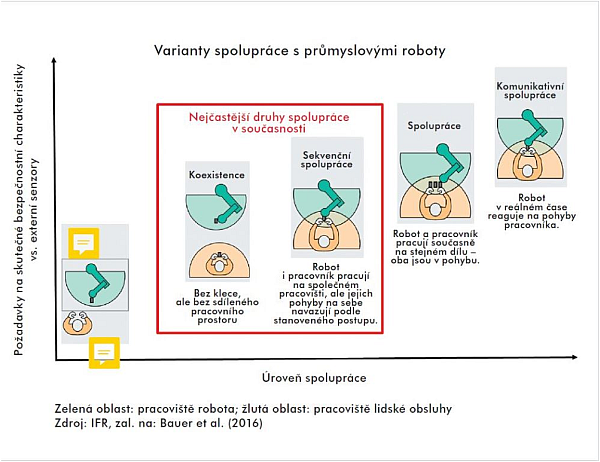
Obr. č. 3: Varianty spolupráce člověka s průmyslovým robotem [6]
V případě interakce lidí a robotického systému je, mimo uvedené standarty, důležitá specifikace ISO/TS 15006, která řeší problematiku bezpečnosti kolaborativních robotů. Vznikla v roce 2016 jako doplněk citovaných norem ISO 10218-1,2. Jsou v ní definovány možnosti a rizika společné práce člověka a robota. Vznikla na základě myšlenky, že pokud budou řádně a jednoznačně vymezeny kolizní stavy, kdy robot může zranit člověka, nebo mu způsobit bolest, tak není důvod bránit projektování takových pracovišť. Před vydáním této specifikace měli dodavatelé pouze obecné informace o požadavcích na systémy spolupráce. V ISO/TS 15066 jsou konkrétní bezpečnostní pokyny, které slouží pro hodnocení a kontrolu rizik. Při implementaci robotů podle uvedeného standardu nemusí být použity tradiční ochranné kryty a ochranná zařízení, která udržují lidi a systémy robotů trvale odděleny. Technická specifikace pro tyto řešení obsahuje údaje ze studie o prazích bolesti různých částí lidského těla, které mohou být použity pro vhodný návrh a provedení robotických aplikací nebo pro analýzu bezpečnostních rizik při fyzickém kontaktu [7].
Ergonomie jako součást projektování kolaborativních pracovišť
Zásadním přístupem při projektování kolaborativního pracoviště je respektování ergonomických principů podle ISO 26800: 2011. V této normě je představen obecný ergonomický přístup a jsou specifikovány základní ergonomické zásady a koncepty. Tyto jsou použitelné při navrhování a hodnocení projektů, produktů, nástrojů, zařízení, systémů, organizací, služeb, zařízení a prostředí, aby byly slučitelné s potřebami, schopnostmi a omezeními lidí. Obr. č. 3 představuje základní přístup k otázce bezpečnosti a ergonomie při projektování systémů HRC Pro případ projektování společného pracoviště člověk-robot existují dvě základní roviny zájmu o bezpečnost a ergonomii, a to je oblast technologická a organizační. První oblast je zaměřena na vývoj a testování nových technik pro optimální výkon robota v souladu s bezpečností. Druhá oblast se zaměřuje na organizační záležitosti a přístupy, které přispějí pro lepší návrh a hodnocení pracoviště z pohledu přítomnosti operátora.

Obr. č. 4: Základní požadavky na bezpečnost a ergonomii při projektování kolaborativních pracovišť
Při každém řešení možnosti nasazení kolaborativního robota do praxe je prvořadým zájmem bezpečnost spolupracujícího člověka. V literatuře [6] je uvedeno, že jeden ze současných trendů projektování kolaborativních pracovišť je ten, kdy se interakce mezi robotem a operátorem zkracuje na velice malou vzdálenost. Využitím známých hodnot souřadnicového systému práce robota a přesného měření pozice a dosahových možností člověka v pracovním prostoru lze zajistit přesné nastavení rychlosti robota pomocí měření vzdáleností v reálném čase. To je jeden z důležitých faktorů pro zabránění kolize a následného zranění. Analýza kontaktů mezi člověkem a spolupracujícího stroje je zvláště důležitá pro celkové nastavení rychlosti a pracovních pozic ramena robota.
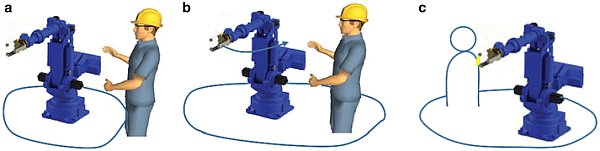
Obr. č. 5: Klasifikace spolupráce člověka a robota [8]
a) Bezpečná vzdálenost stroje a operátora, b) Redukovaná rychlost robota s ohledem na operátora v pracovní zóně c) Kalibrovaná síla robota a přesná pozice při přímém dotyku ramene robota a člověka
S větší prioritou a naléhavostí se uplatňuje při projektování pracovišť antropocentrický přístup. Což znamená, absolutně respektovat lidský faktor, tak aby součinnost práce člověka a robota představovala optimální řešení z mnoha pohledů. Nejdůležitější z nich je bezpečnost. Dokument, který popisuje požadavky a doporučení, týkající se návrhu činností, zaměřených na člověka v průběhu životního cyklu počítačových interaktivních systémů, kterým může být rovněž kolaborativní pracoviště, je uvedeno v normě ČSN ISO 9241-210:2010.
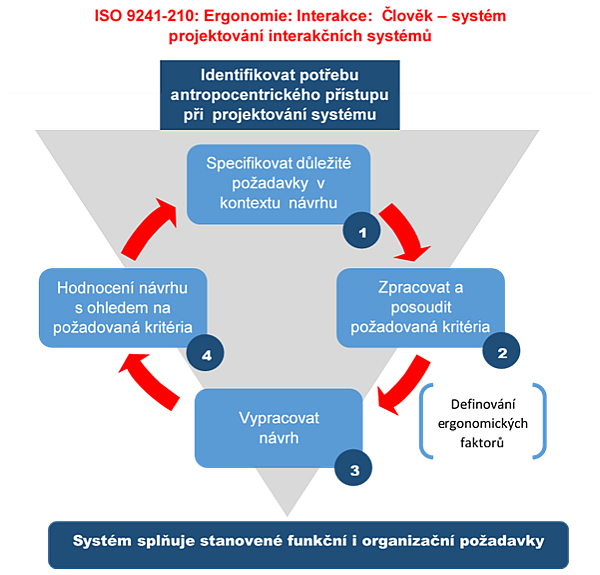
Obr. č. 6: Obecný přístup k projektování kolaborativního pracoviště podle ISO 9241-210 [11]
Norma je doporučena projektovým manažerům, kteří se zabývají návrhem a realizací zmíněných pracovišť. Jsou v ní uvedeny v nezbytné míře technické parametry a ergonomické otázky. V odborné literatuře se tento přístup nazývá Human-centered-design (HCD) a nabízí návod, jak v nejvyšší možné míře respektovat lidský faktor s ohledem na bezpečnost a optimální pracovní podmínky. Postup řešení je prezentován na obr. č. 5. Proces je rozdělen do 4 kroků, který při dodržení ergonomických pravidel a doporučení splňuje předpoklad realizace optimálního pracoviště z pohledu spolupráce člověk-robot. Základní charakteristikou tohoto přístupu je vícefázový proces řešení problému, který nepožaduje na projektantech pouze analýzu a návrh podle zadání a znalosti základních technologických kritérií. Jedná se také o ověření domněnek o chování operátorů v součinnosti s robotem, uplatnění ergonomických poznatků, které jsou založeny na respektování antropocentrického přístupu. Ověřování probíhá pomocí testů v reálných podmínkách a musí být vyloučeny všechny kolizní situace, které by znamenaly zvýšené nebezpečí úrazu, nebo dokonce smrti, operátora.
Závěr
Principy ergonomických zásad získávají v současném světě využívání moderních technologií a rozvoji automatizace nový význam. V tomto pojetí jsou více propojeni s požadavky na nutnou úroveň bezpečnosti. Standard ISO 9241-210:2010 představuje návod pro uplatnění nového přístupu (HCD) pro designové řešení produktu. Tento dokument je nezbytným doplňkem stávajících norem pro návrh společných pracovišť člověk-robot a v současnosti není mezi projektanty příliš známý. Antropocentrický přístup při projektování takových pracovišť je založen na myšlence, že člověk má oproti robotu určitá omezení a tato omezení mohou být hlavní příčinou chyb a selhání, související s prací operátora. Toto je důvod, proč by mělo být osvojení ergonomických zásad, rovněž tak znalost ISO 9241-210, součástí projektových prací při návrhu kolaborativních pracovišť.
Tento článek byl vytvořen v rámci projektu SGS-2019-008: Výzkum a vývoj pro inovace v oblasti Výrobní technologie - technologie obrábění III.
Seznam použité literatury
[1] Trh s kolaborativními roboty vzroste do roku 2025 na 12,3 miliard dolarů. OneIndustry automatizace [online]. Oneindustry, 28. 5. 2019 [cit. 2020-07-07]. Dostupné z: https://automatizace.oneindustry.one/trh-s-kolaborativnimi-roboty-vzroste-do-roku-2025-na-123-miliard-dolaru/.
[2] Inovační strategie ČR 2019-2030 [online]. Úřad vlády České republiky, c2015 [cit. 2020-24-06]. Dostupné z: https://www.vyzkum.cz/FrontClanek.aspx?idsekce=866015.
[3] BÉLANGER-BARRETTE, Mathieu. Getting Started with Collaborative Robots: Machine Tending. ROBOTIQ [online]. Last updated on Nov 26, 2019 [cit. 2020-05-06]. Dostupné z: https://blog.robotiq.com/getting-started-with-collaborative-robotsmachine-tending-application.
[4] JANIŠOVÁ, Hana. Technologie, roboti a profese budoucnosti. MM Průmyslové spektrum [online]. 2018, č. 1 [cit. 2020-07-07]. Dostupné z: https://www.mmspektrum.com/clanek/technologie-roboti-a-profese-budoucnosti.html.
[5] BROUM, T.; SIMON, M. Safety requirements related to collaborative robots in the Czech Republic. MM Science Journal [online]. March 2020 [cit. 2020-07-07]. Dostupné z: DOI : 10.17973/MMSJ.2020_03_2019136. ISSN 1211-4162.
[6] Demystifikace kolaborativních průmyslových robotů. Digitovárna.cz [online]. 06. 03. 2019 [cit. 2020-07-07]. Dostupné z: http://www.digitovarna.cz/clanek-84/demystifikace-kolaborativnich-prumyslovych-robotu.html.
[7] VOJÁČEK, Antonín. Problematika bezpečnosti kolaborativních robotů: ISO/TS 15066. Automatizace.hw.cz [online]. 17. říjen 2019 [cit. 2020-15-06]. Dostupné z: https://automatizace.hw.cz/problematika-bezpecnosti-kolaborativnich-robotu-isots-15066.html.
[8] ISO/TS 15066:2016. Robots and robotic devices - Collaborative robots [online]. ISO [cit. 2020-15-06]. Dostupné z: https://www.iso.org/standard/62996.html.
[9] KHALID, A. …[et al.]. Safety Requirements in Collaborative Human Robot Cyber Physical Systems [online]. In: Dynamics in Logistics - Proceedings of LDIC, Bremen, Germany. Springer International Publishing, February 2016 [cit. 2020-15-06]. Dostupné z: https://www.researchgate.net/publication/295912158_Safety_Requirements_in_Collaborative_Human_Robot_Cyber_Physical_Systems.
[10] LASOTA, Przemyslaw A. …[et al.]. Toward safe close-proximity human-robot interaction with standard industrial robots [online]. In: IEEE International Conference on Automation Science and Engineering (CASE), 8-22 August 2014. IEEE, 2014 [cit. 2020-15-06]. Dostupné z: https://ieeexplore.ieee.org/document/6899348.
[11] KHALID, A …[et al.]. A methodology to develop collaborative robotic cyber physical systems for production environments. Logistics Research [online]. 2016, vol. 9, s. 1-15 [cit. 2020-15-06]. Dostupné z: https://link.springer.com/article/10.1007/s12159-016-0151-x.
Vzorová citace
POKORNÁ, Václava. Základní přístup k otázkám bezpečnosti a ergonomie při projektování kolaborativních pracovišť. Časopis výzkumu a aplikací v profesionální bezpečnosti [online]. 2020, roč. 13, č. 2-3. Dostupný z: https://www.bozpinfo.cz/josra/zakladni-pristup-k-otazkam-bezpecnosti-ergonomie-pri-projektovani-kolaborativnich-pracovist. ISSN 1803-3687.
Užitečné odkazy
Provozovatel portálu
Jeruzalémská 1283/9
110 00 Praha 1
Sociální sítě VÚBP
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Kde nás najdete
